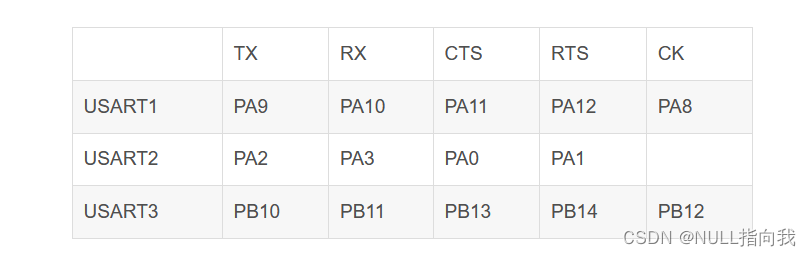
今日学习使用STM32 C8T6的串口,我们在经过学习笔记2的总结归纳可知,STM32 C8T6最小系统板上有三路串口,如下图:
今日我们就着手学习如何配置开通这些串口进行收发,这里不讲串口通信概念与基础,可以自行网上查找,本文直接开始介绍库函数与编程实现:
串口配置相关库函数介绍:
打开串口GPIO的时钟:
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
/*
#define RCC_APB2Periph_GPIOA ((uint32_t)0x00000004)
#define RCC_APB2Periph_GPIOB ((uint32_t)0x00000008)
#define RCC_APB2Periph_GPIOC ((uint32_t)0x00000010)
#define RCC_APB2Periph_GPIOD ((uint32_t)0x00000020)
#define RCC_APB2Periph_GPIOE ((uint32_t)0x00000040)
#define RCC_APB2Periph_GPIOF ((uint32_t)0x00000080)
#define RCC_APB2Periph_GPIOG ((uint32_t)0x00000100)
*/
打开串口外设的时钟:
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
/*
#define RCC_APB2Periph_USART1 ((uint32_t)0x00004000)
#define RCC_APB1Periph_USART2 ((uint32_t)0x00020000)
#define RCC_APB1Periph_USART3 ((uint32_t)0x00040000)
#define RCC_APB1Periph_UART4 ((uint32_t)0x00080000)
#define RCC_APB1Periph_UART5 ((uint32_t)0x00100000)
*/
串口的初始化配置:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
/*
USART1 USART2 USART3
*/
向量中断控制器组选择:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
初始化配置NVIC:
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
串口接收:
USART_ReceiveData(USART1)串口配置编程:
首先创建好要用的几个文件.c 与.h,在添加进工程,别忘了添加路径~
串口的初始化:
以下是串口1的初始化以及配置中断优先级,中断优先级的配置分为主优先和子优先,有关中断优先级的配置这放在以后再说~~~,
测试工程文件我还编写了串口2,3的初始化,可以下载测试观察~
#include "USART_init.h"
void Usart1_Init(unsigned int baud)
{
GPIO_InitTypeDef gpio_initstruct;
USART_InitTypeDef usart_initstruct;
NVIC_InitTypeDef nvic_initstruct;
// 打开串口GPIO的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 打开串口外设的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//PA9 TXD // 将USART Tx的GPIO配置为推挽复用模式
gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initstruct.GPIO_Pin = GPIO_Pin_9;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_initstruct);
//PA10 RXD // 将USART Rx的GPIO配置为浮空输入模式
gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_initstruct.GPIO_Pin = GPIO_Pin_10;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpio_initstruct);
usart_initstruct.USART_BaudRate = baud; //配置波特率
usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收和发送
usart_initstruct.USART_Parity = USART_Parity_No; //无校验
usart_initstruct.USART_StopBits = USART_StopBits_1; //配置停止位 1位停止位
usart_initstruct.USART_WordLength = USART_WordLength_8b; //配置 针数据字长 8位数据位
// 完成串口的初始化配置
USART_Init(USART1, &usart_initstruct);
USART_Cmd(USART1, ENABLE); //使能串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); /* 嵌套向量中断控制器组选择 */
nvic_initstruct.NVIC_IRQChannel = USART1_IRQn; /* 配置USART为中断源 */
nvic_initstruct.NVIC_IRQChannelCmd = ENABLE; /* 使能中断 */
nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 0; /* 抢断优先级*/
nvic_initstruct.NVIC_IRQChannelSubPriority = 2; /* 子优先级 */
NVIC_Init(&nvic_initstruct); /* 初始化配置NVIC */
}
串口中断服务函数的编写:
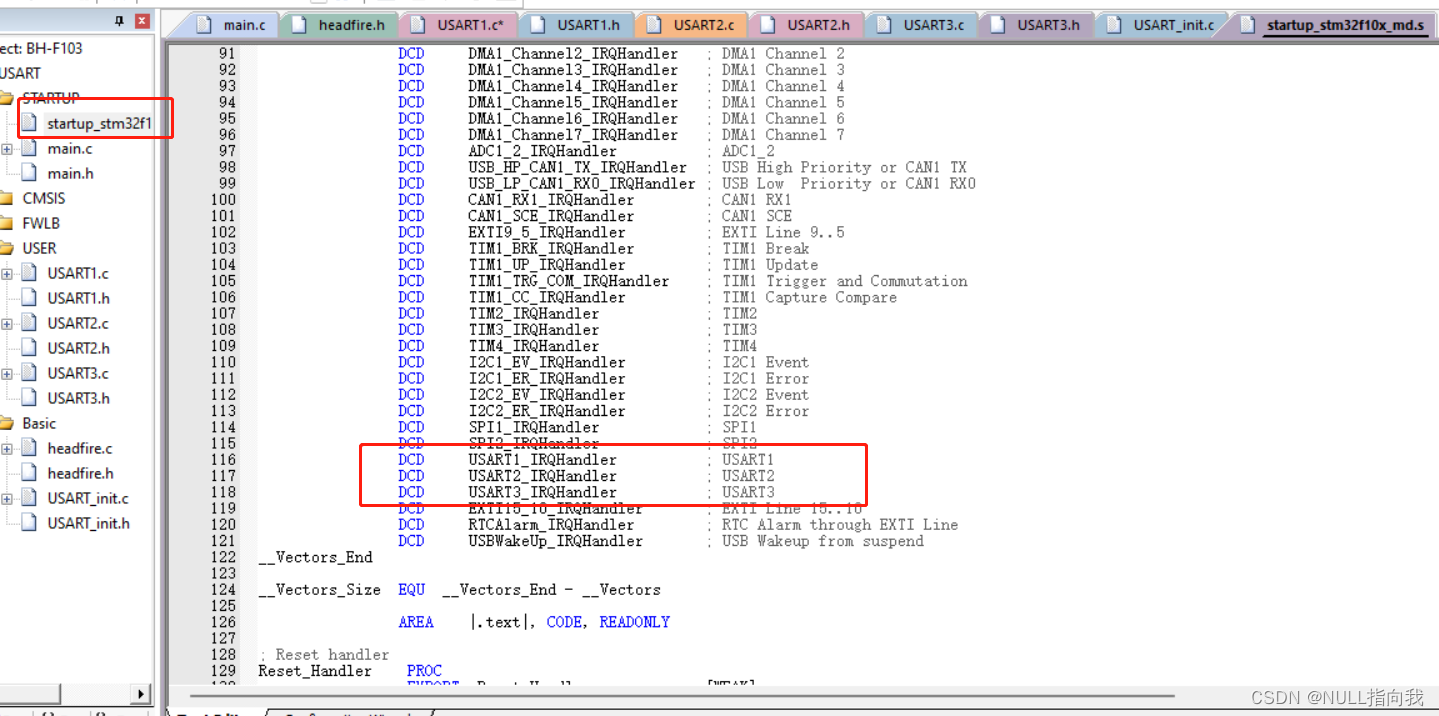
首先在启动文件找到三个串口的中断服务函数:
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{USART_ClearFlag(USART1, USART_FLAG_RXNE);}
//返回收到的任意数据
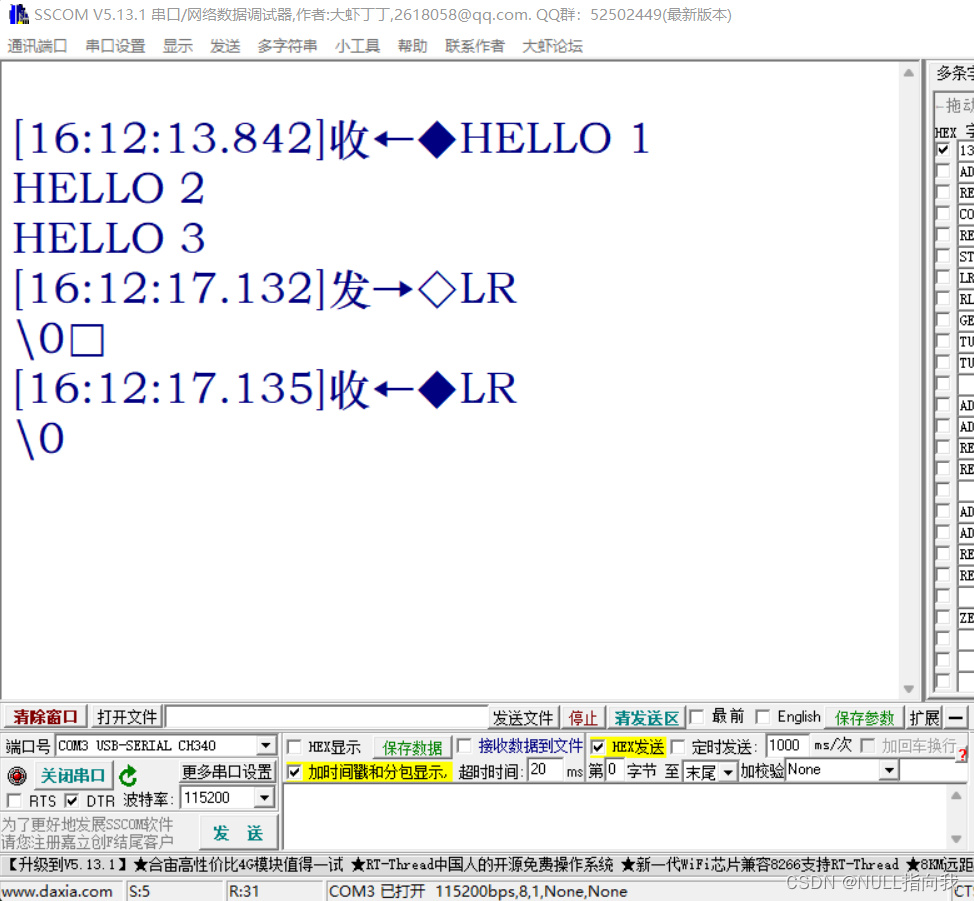
USART_SendData(USART1,USART_ReceiveData(USART1));
}测试结果截图:
工程下载:
https://download.csdn.net/download/qq_64257614/88201777?spm=1001.2014.3001.5503